High
Dynamic Range Imaging
Chaman Singh Verma and Mon-Ju

Contents:
- Introduction
- Implementation Details.
- Results
- Response Curves and Radiance Map
- Tone mapping and Perceptual Image Quality
- Performance
- Comparison with other software.
- Improvement and Future work.
- Appendix
- Dataset.
- Software usage guide.
Introduction:
Human eyes have extremely high visual
range that can easily
differentiate between very bright and dark regions in the same
scene. High Dynamic Range Imaging is a technique to emulate this
behavior with the low end commercial cameras available in the market
by taking images of the same static scene at various exposures and then
merging the images.
In a simple static setting, the process of HDR starts from image
acquisition at various exposures of the same scene at quick succession
so that effect of changing light conditions can be ignored. Despite
using tripods for greater control, some perturbation is inevitable,
therefore, image alignment is often necessary.
In this class project, we have implement Debevec algorithms to
calculate the radiance map.
Tone mapping goes in reverse direction, the HDR values calculated from
the step three, cannot be used on devices which has limited dynamic
range. The idea of tone mapping is to reduce the dynamic range in a way
that preserves the features in the HDR images and present colors which
are pleasing and appreciable to human eyes.

Implementation Details:
The radiance equation from the Devebec paper is given as:
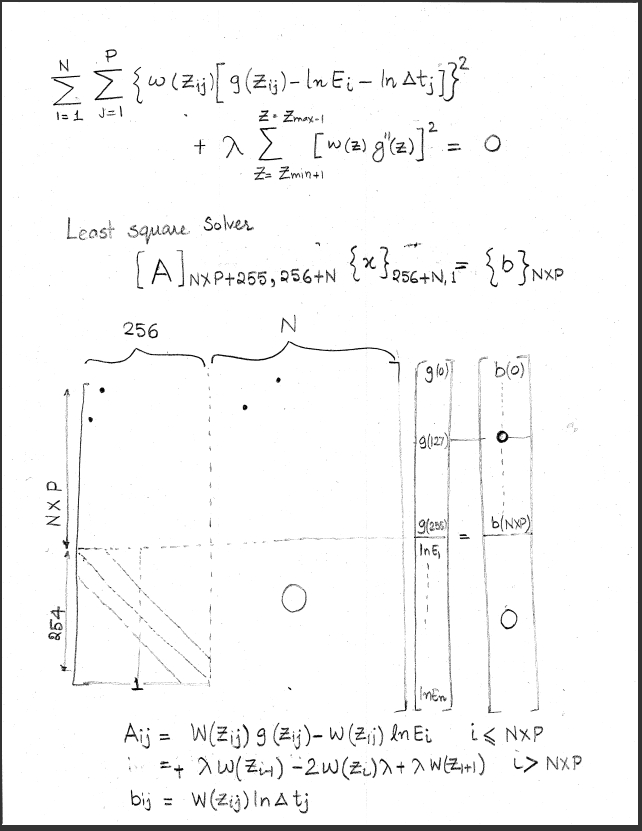
Two important issue in solving
this equation are:
- Sampling: As described in the paper, we need not select all
the pixel available in the image, but only to satisfy N(P-1) >
(Zmax-Zmin). We have chosen about 100-200 pixels randomly from middle
exposed
image in the range of (5-250). Presently, for each color channel
sampling is done independently.
- Lambda : The second term in the equation is the penalty term and
proper selection of lambda ensures that the resulting response curve is
smooth.
Results and Conclusions:
- Test and Benchmarking: There
are many commercial and public
domain software available that can do high dynamic range imaging. One
of the publicly available such tool is PFSTools with which we compared our
results using Reinhard tone mapping. The final color depends on many
parameters and it is hard to judge why our implementation produces
better results ( it has more yellow and red colors on the top
which is closer to real Madison Capitol building).

|

|
HDR with
pfstools
|
Our
Implementation
|
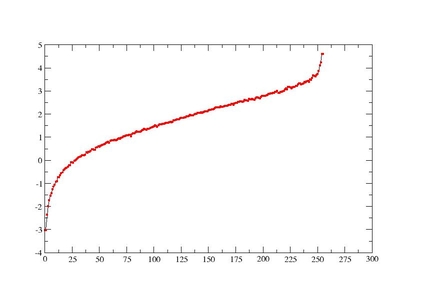
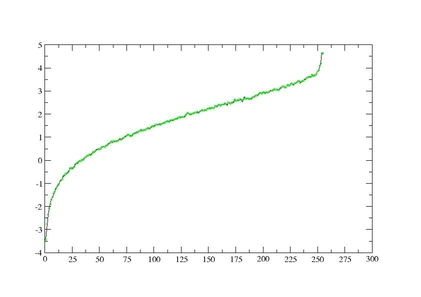
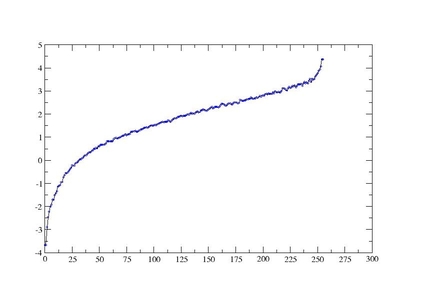
Response Curves:
For each red, green and blue channels, radiance map is calculated from
the Debevec equations. Ideally, the radiance map must be smooth and
monotonically increase, but because of errors introduced in solving the
equations and possibly imperfect imaging devices, we get little
perturbations in the calculated maps. Polynomial fitting could be used
to get the smooth curves, but this is not done in this study. It is
also likely that near the saturation ends ( 0 and 255 values ), the
curve show some erratic behavior, but this can be handled by
truncating or clampiing the graph.
(Z, lnE)
radiance map of Red, Green and Blue colors.
Tone Mapping and Perceptual Image Quality:

HDR Image with Reinhard02
tone Mapping

HDR with Fast Bilateral Tone Mapping
As we can see, both Reinhard
algorithm preserves the color better than
Durand's Fast Bilateral tone mapping as can be seen near the upper
arch, where Reinhard has more yellow color preserved. But Durand's
algorithms preserves the sharp edges far more better than Reinhard
algorithm.
Performance Results
The results were taken on HP-9308NR notebook with 1GM RAM. For a
dataset of 30 images, the table shows that the maximum time is taken in
loading the images and extracting the colors. The HDR process is
independent of image size and take fraction of overall time.
Action
|
Execution
Time(sec)
1024x768
|
Execution
time (Sec)
2048x1536
|
loading images
|
25
|
36
|
Extracting {R,G,B} Color
|
150
|
180
|
Selecting random points
|
03 |
18
|
Generating Matrix
|
03
|
03
|
Solving least square problem
(Lapack)
|
36
|
36
|
Generating HDR image.
|
02
|
02
|
Total
|
219
|
275
|
Appendix
Datasets:
These dataset are from beautiful Madison Capitol building.
Software and User Guide:
The entire
software
UWHDR
is written in standard C++ on Linux running ubuntu 9.04. There are some
public domain software that we have used in developing this code and
they are:
- CLAPACK
: solving least square matrix.
- ImageMagick++
: For image loading, exposure time attribute extraction.
- RGBE
: Stores 3*nx*ny floating point data in Radiance *.hdr format.
- pfstools1.8.1 :
Create tone mapping on a given *.hdr file. It support many tone mapping
algorithms, but we use only Reinhard02 and Durand's Fast Bilateral Tone
mapping algorithms. pfstools depends on openEXR software, which has its
own dependencies on other public domain software. Installing everything
and making it work wasn't straightforward.
Software Usage:
Assuming that all external software are installed on the machine then
use
makefile to compile the code. Create one
directory that contains all the images ( tested with JPEG ). Make sure
that
only the relevant image files are in the directory. Then use
where directory_name is the directory where images are stored. The
value of
lambda depends on
the image set which is used to smooth out the radiance map. Start with
small values (~0.1 ) and increase the value till a smooth monotonically
radiance map is obtained. It is however likely that the near end points
the radiance map may be erratic and therefore, care must be taken to
clamp the radiance map rather than changing the
"lambda" values. For most of the
cases, the
lambda value
(1.0-5.0) was good enough.
This will generate "scene.hdr" file. which becomes input for tone
mapping.
pfsin scene.hdr | pfstmo_reinhard02 -s | pfsout scene.png
Besides generating "scene.hdr"
uwhdr
also generates red, green and blue radiance maps. They are stored in
lnE0.dat, lnE1,dat and lnE2.dat.
To visualize the scene.png image:
display scene.png
Mon-Ju has written similar code in Matlab
HDR.m.
Reference
Recoveing High Dynamic Range Radiance Map from Photographs: Paul
E. Debevec and Jitendra Malik.