Project2 Phase3 solution
For questions 1-5, we
consider a 2D graphics system that works like OpenGL. It uses 3x3 homogeneous matrices and a post-multiply convention.
It has a matrix stack, and supports the following commands:
PUSH – makes a copy of
the top element of the matrix stack
POP – removes the top
element of the matrix stack
TRANS(x,y) - translates
by x,y
ROT(t) - rotates counter
clockwise by t degrees
SCALE(x,y) - scales by
x,y
SQUARE - draws a unit
square between (0,0) and (1,1)
Here is an example program and its output:
|
Draw Square PushMatrix Scale(2,2) Translate(2,1) Scale(-1,1) Draw Square PopMatrix Rotate 90 Translate -3,0 Draw Square |
|
Question 1:
If we had left out the PushMatrix/PopMatrix commands in the example program, the last square
would have appeared in a different place. Where would it have been?
(give the positions of its 4 corners)
(see the blue square
in the picture)
(4,-2), (6,-2), (6,-4), (4,-4)
Hint: the reflection changes the direction of rotation.
Question 2:
Write a program that
creates the following picture, without using PushMatrix or PopMatrix.
|
Note:
there are many possible answers, this is just one: translate(5,0); draw
Square(); translate(-2,0); scale(2,2); draw
Square(); scale(1.5,1.5); translate(-1,0); draw
Square(); |
|
Question 3:
When dealing with
images, we often like to measure the screen in pixels (with 0,0 being the upper
left, and width-1, height-1 being the lower right). When dealing with geometry,
we often like to have “Normalized Device Coorindates” where the center of the
window is 0,0, and 1,1 is the upper right corner (and -1,-1 is the lower left).
Question 3A:
Using the 2D transform
commands above, write a program that creates the transformation from normalized
device coordinates to pixel coordinates for a screen of size 640x280 on the top
of the stack. (your answer should be a sequence of commands)
Note: it might be better
to use 319.5 and 239.5 instead of 320 and 240, but we accepted both answers in
parts A and B.
translate
320, 240
scale 320,
-240
or
scale 320,
-240
translate
1, -1
Question 3B:
If the screen is 640 by
480 pixels, what would the matrix be? (your answer should be a 3x3 matrix).
Hint: it is probably easier to figure out the
answer directly than to multiply out the matrices.
320 0 320
0 -240 240
0 0 1
Question 4:
Give the 3x3 matrix that
would transform the unit square (with one of its corners at 0,0, and the
opposite corner at 1,1) such that: The corner that was at the origin goes to
1,2. The corner that was at 0,1 goes to 3,4. The corner that was at 1,1 goes to
5,6.
to figure this out, we
can easily see what the right column is (since its where things will go with
the 0,0 vector)
to get the middle column, we need to subtract
off the translation, and then the destination of the Y axis becomes to middle
column.
filling in these two columns, we get:
x 2 1
y 2 2
0 0 1
and we know that this
matrix, times the vector [1 1 1] must give [5 6 1].
so:
x + 2 + 1 =
5
y + 2 + 2 =
6
1 = 1
so, the matrix is:
2 2 1
2 2 2
0 0 1
Question 5:
Give the program that creates
a rotation of 45 degrees around the point 3,4.
translate
3,4
rotate 45
translate
-3,-4
Question 6:
Consider the desk lamp
in this picture:
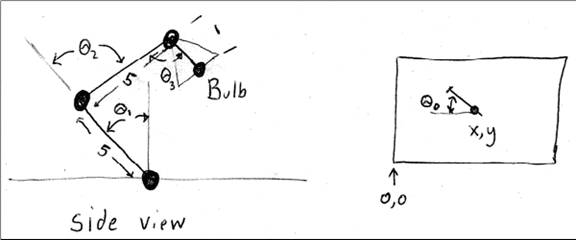
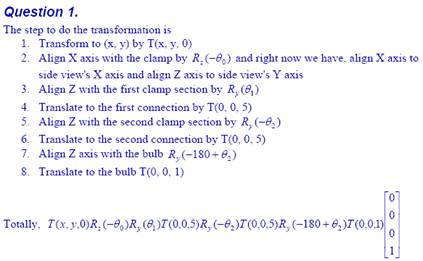
The lengths of the arms are 5, and the tip of
the bulb is 1 unit from the joint. x,y, and theta 0-3 are all parameters to
position the lamp. Write an expression that computes the position of the bulb
(point B) in the coordinate system of the desk. Your expression should be the
product of a set of Matrices T(x,y,z) (that translates by x,y,z) and Rx(theta)
that rotates theta degrees around the x axis (or Ry or Rz). These matrices are
post-multiply and the rotations are measured counter clockwise in right-handed
coordinate systems.
Question 7
Question 8
Basis matrix of
Catmull-Rom:
|
0 |
1 |
0 |
0 |
|
-1/2 |
0 |
1/2 |
0 |
|
1 |
-5/2 |
2 |
-1/2 |
|
-1/2 |
3/2 |
-3/2 |
1/2 |
a0 = (0, 2)
a1 = (2, 1)
a2 = (6, -3/2)
a3 = (-4, 1/2)
Where
is the point at t=1/2?
f(1/2) = (2, 35/16)
(there's no real shortcut here, compute u B p with u = [1 1/2 1/4 1/8])
What
direction is it facing?
f'(1/2) = (5, -1/8) - if you normalized this vector, that's an even better
answer, but messier
(the easiest way to do this is to notice that only the u vector depends on the
parameter, so u' = [ 0 1 2u 3u^2 ] = [ 0 1 1 3/4], and compute u' B p)
What
is the magnitude of its velocity?
sqrt(5*5 + (-1/8)*(-1/8)) = sqrt(1601)/8
Question 9
f'(0) = 4(P1 - P0) =
(0, 8)
f'(1) = 4(P4 - P3) = (0, -8)
(4, 0), (4, -8/3), (0, -8/3), (0, 0)
Question 10
DeCastlejau algorithm:
(0,0), (0,2), (2,4), (4,2), (4,0)
-> (0, 1), (1, 3), (3, 3), (4, 1)
-> (1/2, 2), (2, 3), (7/2, 2)
-> (5/4, 5/2), (11/4, 5/2)
->(2, 5/2)
Segment 1: (0, 0), (0, 1), (1/2, 2), (5/4,
5/2), (2, 5/2)
Segment 2: (2, 5/2), (11/4, 5/2), (7/2, 2), (4, 1), (4, 0)