Approach
- Image Undistortion : After taking the images, undistortion is done on them using the camera distortion parameters k1 and k2 and focal length. We undistort by reverse warping. Assumption is done that we have a distortion free image(buffer), and we model this particular image cordinates to have distortion. Now, we take the pixel values from these locations and fill up the buffer.
- Converting to cylindrical coordinates: Each image was wrapped onto a cylinder with radius equal to focal length, getting the consecutive images into one plane near the boundaries. This was done with inverse mapping.
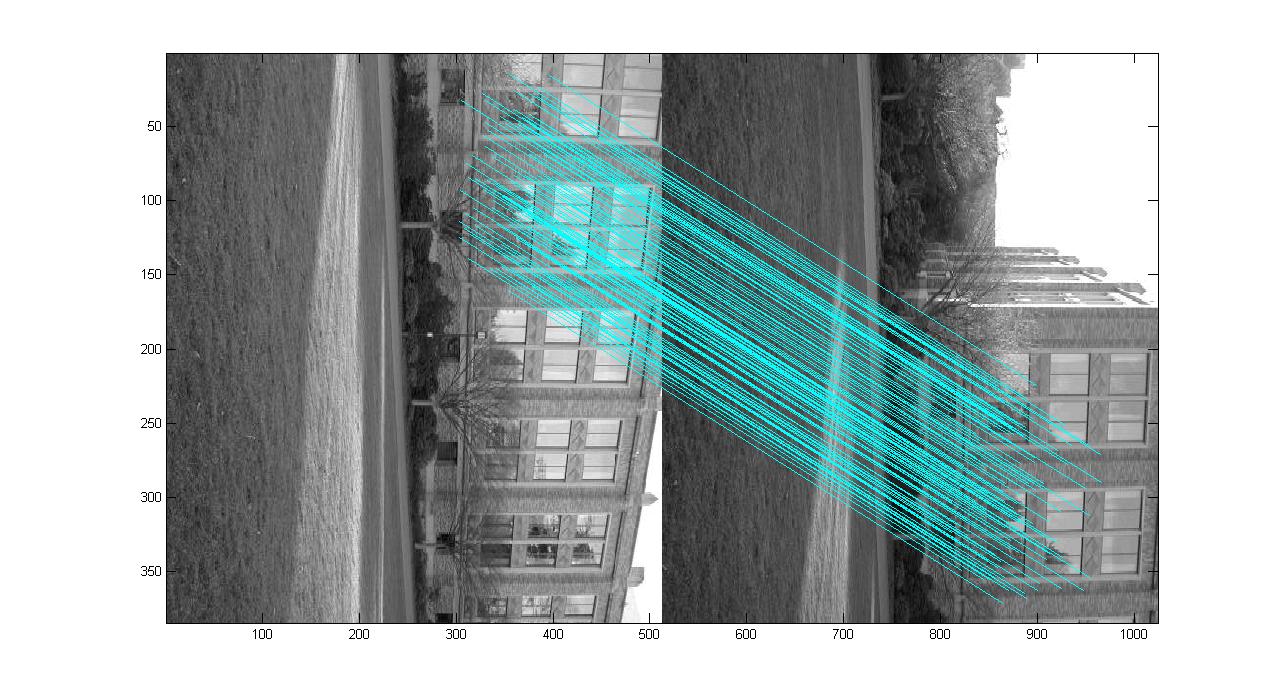
- Feature based method for image alignment: we find SIFT features for both the images to be aligned using the SIFT program provided. The SIFT program returns a descriptor and location for each point of interest. A matching agorithm is written to find pairs of correspondence between the SIFT features using exhaustive search and remove outliers to an extent by checking how different the best matched feature is from the second best. Any remaining outliers after this are removed using RANSAC algorithm. The parameters important in the RANSAC algorithm performance were 'no. of sample points randomly selected for calculating the exact model','no. of iterations','threshold to determine whether other points agree with the calculated model','size of consensus set to check whether a determned model is good or not'. Output of RANSAC algorithm was the translational vector between two images.
- Forming the Panorama: Using the translational vectors (returned from RANSAC), images are aligned to form the panorama.For Blending, a weighting function is used where the weights are calculated based on the squared distance from each pixel to its corresponding image center. So, given img1 and img2, the resulting pixel would be ( 1/r1^2 * p1 + 1/r2^2 * p2 ) / (1/r1^2 + 1/r1^2) where r1 and r2 are the distances from the center of img1 and img2 to p1 and p2 respectively, and p1 and p2 are pixel values from img1 and img2 respectively. (The weights only vary across columns. This was done because the images mostly have horizontal translation).
- Solving the drifting problem: To remove any vertical drift between the first and last image a linear warp is done on the mosaic. The warp is of the form y' = y + ax, Cropping: Result is cropped to get the final panorama.
Instructions to run the code
- The folder 'mosaic_testimages_final' contains the following scripts : 1. final_startup.m 2.cylin.m 3. ComputeHomographySimple.m (there are other .m and binar files which are used for finding SIFT features.)
- Step 1: Get the input images which are in the folder 'input_images' and copy them into the folder 'mosaic_testimages_final'. Run the script final_startup.m. The program will generate undistorted gray scale images wrapped onto the cylinder and will write them in the current folder. These images will be used for feature detection and matching purposes. Finally, the program will write the panoramic image named 'pano_lab_new.jpg'.
Result of matching algo.(followed by RANSAC) showing translational vectors
Image1 |
Image2 |
O/P showing translational vectors |
 |
 |
 |
INPUT PHOTO SET WE TOOK : showing 5 of the 18 images we took
 |
 |
 |
 |
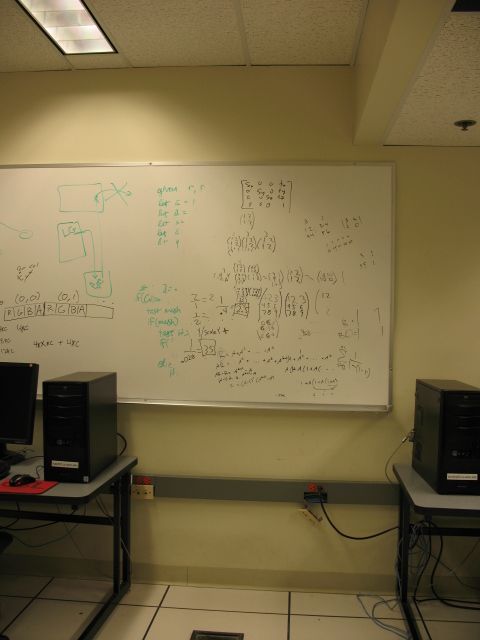 |
Panorama output(CS lab):

Panorama output(Camp Randall Stadium):

Panorama output(CV and graphics lab):

Panorama output(Autostitch result on test images):

Panorama output(our result on test images):

FAVORITE ARTIFACT APPLET
[1] Richard Szeliski and Heung-Yeung Shum, Creating Full View Panoramic Image Mosaics and Environment Maps
[2] Wikipedia - for RANSAC
Contributions would be : Alok : 60% (matching algorithm,RANSAC,blending,panorama) Sundeep : 40%(undistortion,cylindrical) Taking images: Joint contribution