
Project 1: High Dynamic Range Imaging
Computer Vision – CS766 – Fall 2008
Christopher Hopman
Outline
Several algorithms were implemented for this project:
1. Correcting radial distortion
2. Warping an image to a cylinder
3. RANSAC to find a homography
4. Image warping and stitching to form mosaic
Images were captured with a Canon Powershot SX100 IS mounted on a tripod with a Kaidan head. Camera was very poorly aligned, leading to some fun difficulties later on. Camera settings were controlled remotely via Canon's RemoteCapture DC software, and pictures were taken via this software.
Radial distortion and cylindrical warping
Basically this is just implement a simple reverse warp... I did two warps, could have been done with one
Again, basically just implementing the algorithm. The previous step, finding feature points and
matching them was done with the given SIFT software and code (which was modified a bit).
So, due to my very bad setup of the camera this became rather complicated.
here's an early result.
|
The mosaic results for my images were not that good. As noted above I think that several things led to less than stellar
mosaics. Here's some pics
Anyway, some of the code stuff. Basically every step is coded seperately. They take an input file that is generated by the step before. Do what they do, then you run the next one.
oh, and a result on something a little bit better behaved.
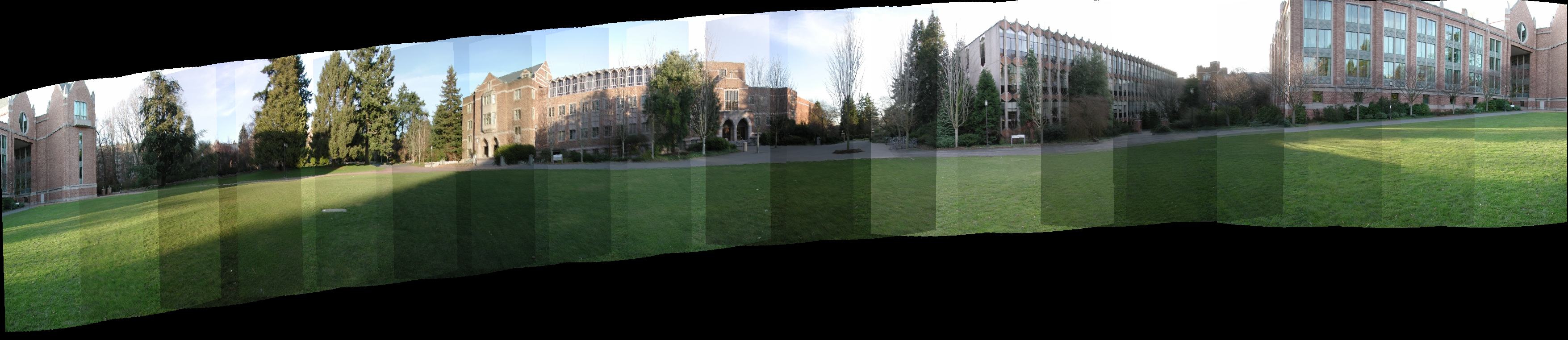
and that one with the error corrected. error seemed to accumulated with square of distance so
corrected by that, rather than just linearly. Links to the viewer with this image.
