Mark Pingel and Tamara Miller
Computer Vision Project, Fall 2000
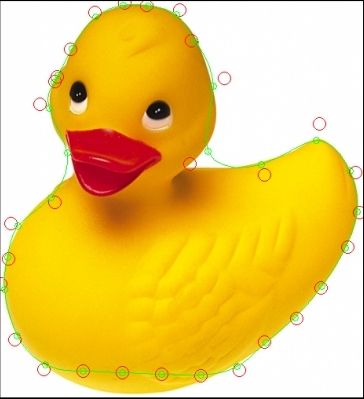
Our project implements a methodology for tracking image curves using parametric B-Spline snakes. We start by reading in an image in one of several formats. Upon reading in the image, we extract the edge information through the use of the Canny edge detection algorithm. Once this edge image has been extracted, we fit a B-Spline snake to the contour through minimizing the energy functional. The necessary energy terms differ in the B-Spline snake implementation from the piecewise linear snake implementation because the B-Spline snake does not have to account for internal energy. The internal energy is handled implicitly by the B-Spline. Our project creates an interface using the FlTk windowing toolkit and provides the user with great flexibility in viewing the edges of the image as well as each step of the minimization process. Finally, our program allows the user to use either a parametric B-Spline snake or a piece-wise linear snake to compare the efficiency and accuracy of the two.
Active contours have been widely used for image segmentation and for tracking within images. Over time, several different implementations and algorithms have been devised for this purpose. One of the most famous and popular one's is the greedy snake algorithm developed by Williams and Shah [4]. In this algorithm, they showed a method for tracking using piece-wise linear segments ( linear snakes ). Their method was both efficient and effective.
Active contours are not restricted to the realm of line segments though. Cubic parametric B-Spline contours have also been used in place of line segments. These contours were developed by Menet [1] and further developed by Cippola [2]. Cubic B-Splines were used because of their implicit properties. When using line segments, internal energy terms such as continuity and curvature had to be explicitly approximated. B-Snakes do not have this extra overhead because B-Splines, by their very definition, are smooth and continous. The methodology for minimizing the energy functional for cubic parametric b-spline snakes was further explained by Cippola and Blake [3].
In our project, we extend the previously used methodologies by performing a quasi-greedy search over the B-Spline control point neighborhoods. We also compare and contrast the results of our B-Snake implementation with the results of the greedy search as defined by Williams and Shah [4].


References
1. Menet, Saint-Marc and Medioni, B-Snakes: Implementation and Application to Stereo.