Computing shortest paths is a fundamental topic in computational geometry and arises in many applications.
The geometric version of the shortest path problem can be stated as follows: Given a d-dimensional space scattered with obstacles, compute a path P connecting two points p and q such that the path P does not intersect the interior of any obstacle and that the total length of P (based on a certain metric such as the Euclidean) is minimized. In this project I will focus on a two-dimensional space scattered with non-moving rigid objects.
Used sources: O'Rourke J., 1998; Computational Geometry in C, Cambridge University Press, Cambridge UK
J. Latombe. Robot Motion Planning. Kluwer, Boston, MA, 1991.
A Java program that reads in a file that was exported by Alias|Wavefront Maya and calculates the convex hull in order to compute a spline that will be used as the motion path.
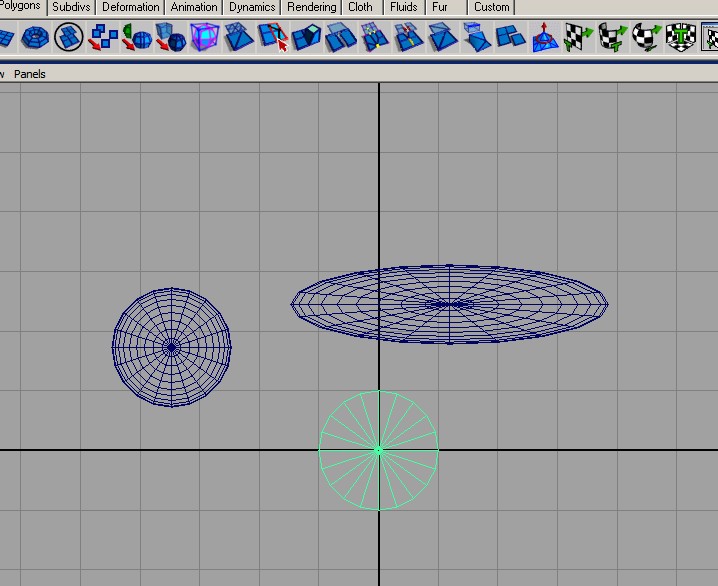
The objects in Maya
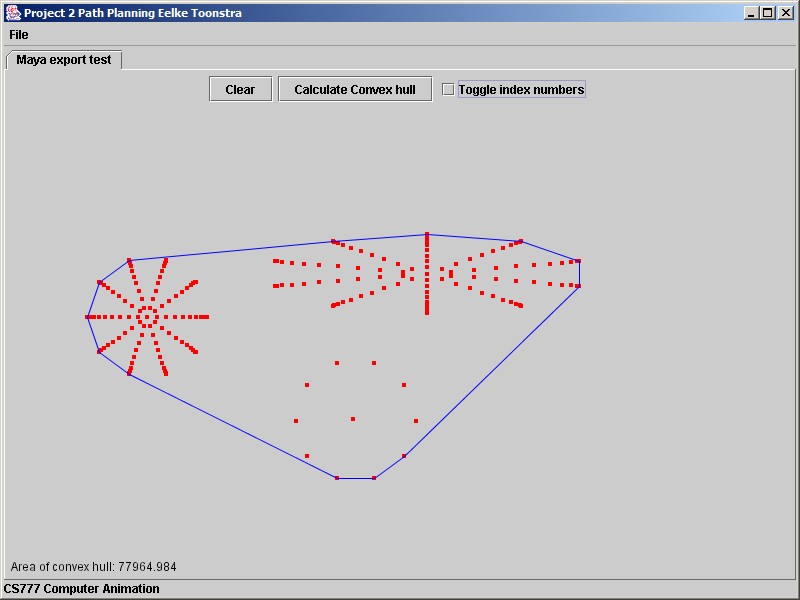
The Java program with the objects and the convex hull.