Successive Numeric Approximation
Terminology
successive numeric approximation : process of solving a mathematical problem using a numeric algorithm that estimates a solution
one estimate leads to the next (hopefully better) estimate
convergence : Does the algorithm always produce the correct answer? Do estimates get better?
rate of convergence : How fast does the algorithm come up with a "good" estimate?
error =
percentage error =
estimated error =
step size (h) : value set at beginning of algorithm
order of accuracy :
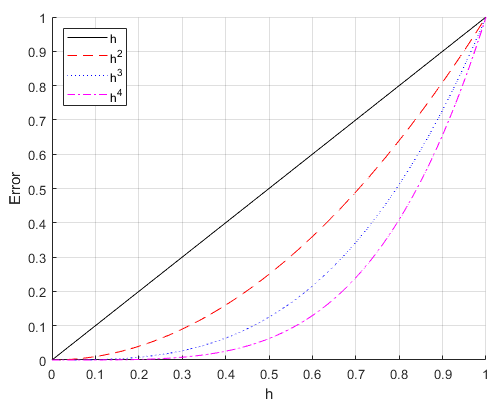
O(h) - linear :
O(h2) - quadratic :
O(h3) - cubic :
Finding roots using Newton's method
Find the value(s) of x such that f(x) = 0
Newton's Method
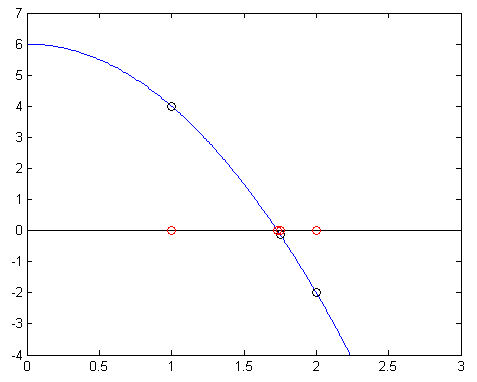
Example: find the roots of f(x) = 6 - 2x2
|
|
x(1) = 1
x(2) = 2
x(3) = 1.75
x(4) = 1.7321428571428572
x(5) = 1.7320508100147276
x(6) = 1.7320508075688772
x(7) = 1.7320508075688774
x(8) = 1.7320508075688772
x(9) = 1.7320508075688774
x(10) = 1.7320508075688772
sqrt(3) = 1.7320508075688772
|
Numerical integration
Trapezoid Method
Simpson's Method
Numerically estimating the derivative
The following function that estimates the derivative of the function fctn
at the value x (using a step size of h):
function dfdx = derivative(fctn, x, h)
dfdx = (fctn(x+h) – fctn(x))/h;
How good of an estimate is this?
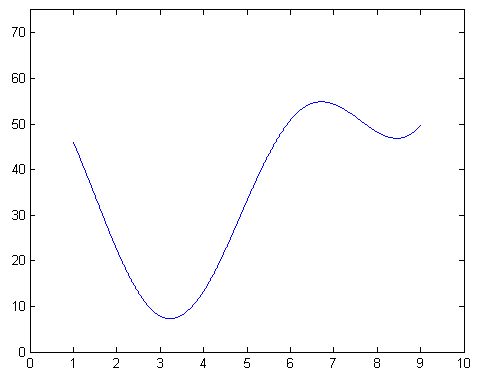
Consider the function f(x) = cos(x) + 2x
We know the derivative is f '(x) = -sin(x) + 2
How does the error change over an interval?
Consider the following code:
fctn = @(x)cos(x) + 2*x;
fprime = @(x)-sin(x) + 2;
xx = 0 : 0.01 : 20;
dyy = derivative(fctn, xx, 0.1);
exactDyy = fprime(xx);
errors = abs(fprime(xx) - dyy);
percErrors = errors./fprime(xx)*100;
plot(xx, percErrors)
title('Percent error of derivative estimate')
xlabel('x')
ylabel('% error')
How does the error change as h changes?
Consider the following code:
for k = 1 : 4
h(k) = 10^(-k);
dyy = derivative(fctn, xx, h(k));
errors = abs(fprime(xx) - dyy);
percErrors = errors./fprime(xx)*100;
meanErrors(k) = mean(percErrors);
maxErrors(k) = max(percErrors);
minErrors(k) = min(percErrors);
end
and the results it calculates:
h meanErrors maxErrors minErrors
0.1000 1.79635296 2.94200783 0.00157170
0.0100 0.18001463 0.28923021 0.00015739
0.0010 0.01800492 0.02887305 0.00002315
0.0001 0.00180053 0.00288680 0.00000212