Automated Extraction and Parameterization of Motions in Large Data Sets
(Lucas Kovar and Michael Gleicher; SIGGRAPH '04)

Large motion data sets often contain many variants of the same kind of motion, but without appropriate tools it is difficult to fully exploit this fact. This paper provides automated methods for identifying logically similar motions in a data set and using them to build a continuous and intuitively parameterized space of motions. To find logically similar motions that are numerically dissimilar, our search method employs a novel distance metric to find ``close'' motions and then uses them as intermediaries to find more distant motions. Search queries are answered at interactive speeds through a precomputation that compactly represents all possibly similar motion segments. Once a set of related motions has been extracted, we automatically register them and apply blending techniques to create a continuous space of motions. Given a function that defines relevant motion parameters, we present a method for extracting motions from this space that accurately possess new parameters requested by the user. Our algorithm extends previous work by explicitly constraining blend weights to reasonable values and having a run-time cost that is nearly independent of the number of example motions. We present experimental results on a test data set of 37,000 frames, or about ten minutes of motion sampled at 60 Hz.
Physical Touchup of Human Motions
(Hyun Joon Shin, Lucas Kovar, and Michael Gleicher; Pacific Graphics '03)
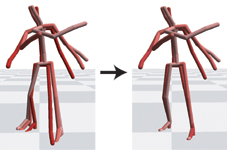
 Most popular motion editing methods do not take physical principles into account, potentially producing physically implausible motions. We present a method for "touching up" motions to improve physical plausibility. Specifically, we first divide the motion into ground and flight stages and then enforce zero moment point constraints in the former and linear/angular momentum constraints in the latter. Unlike previous methods, we do not employ nonlinear optimization; rather, we use efficient closed form algorithms that allow a user to build a set of hierarchical displacement maps which refine user-specified degrees of freedom at different scales.
Most popular motion editing methods do not take physical principles into account, potentially producing physically implausible motions. We present a method for "touching up" motions to improve physical plausibility. Specifically, we first divide the motion into ground and flight stages and then enforce zero moment point constraints in the former and linear/angular momentum constraints in the latter. Unlike previous methods, we do not employ nonlinear optimization; rather, we use efficient closed form algorithms that allow a user to build a set of hierarchical displacement maps which refine user-specified degrees of freedom at different scales.
Registration Curves
(Lucas Kovar and Michael Gleicher; SCA '03)
 Many motion editing algorithms, including transitioning and
multitarget interpolation, can be represented as instances of a
more general operation called motion blending. We introduce a
novel data structure called a registration curve that
expands the class of motions that can be successfully blended
without manual input. Registration curves achieve this by
automatically determining relationships involving the timing,
local coordinate frame, and constraints of the input motions. We
show how registration curves improve upon existing automatic
blending methods and demonstrate their use in common blending
operations.
Many motion editing algorithms, including transitioning and
multitarget interpolation, can be represented as instances of a
more general operation called motion blending. We introduce a
novel data structure called a registration curve that
expands the class of motions that can be successfully blended
without manual input. Registration curves achieve this by
automatically determining relationships involving the timing,
local coordinate frame, and constraints of the input motions. We
show how registration curves improve upon existing automatic
blending methods and demonstrate their use in common blending
operations.
Snap-Together Motion
(Michael Gleicher, Hyun Joon Shin, Lucas Kovar, and Andrew Jepsen; I3D '03)
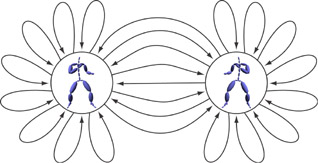
Many virtual environments and games must be populated with synthetic characters to create the desired experience. These characters must move with sufficient realism, so as not to destroy the visual quality of the experience, yet be responsive, controllable, and efficient to simulate. In this paper we present an approach to character motion called Snap-Together Motion that addresses the unique demands of virtual environments. Snap-Together Motion preprocesses a corpus of motion capture examples into a set of short clips that can be concatenated to make continuous streams of motion. The result is a simple graph structure that facilitates efficient planning of character motions. A user-guided process selects ``common'' character poses and the system automatically synthesizes multi-way transitions that connect through these poses. In this manner well-connected graphs can be constructed to suit a particular application, allowing for practical interactive control without the effort of manually specifying all transitions.
Motion Graphs
(Lucas Kovar, Michael Gleicher, and Fred Pighin; SIGGRAPH '02)
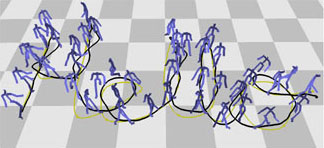 This work presents a novel method for creating realistic, controllable
motion. Given a corpus of motion capture data, we automatically
construct a directed graph called a motion graph that
encapsulates connections among the motions in a database. The motion graph consists both of pieces of original motion and automatically generated transitions. Motion can be generated simply by building walks on the graph. We present a general framework for extracting particular graph walks that meet a user's specifications. We then show how this framework can be applied to the specific problem of generating
different styles of locomotion along arbitrary paths.
This work presents a novel method for creating realistic, controllable
motion. Given a corpus of motion capture data, we automatically
construct a directed graph called a motion graph that
encapsulates connections among the motions in a database. The motion graph consists both of pieces of original motion and automatically generated transitions. Motion can be generated simply by building walks on the graph. We present a general framework for extracting particular graph walks that meet a user's specifications. We then show how this framework can be applied to the specific problem of generating
different styles of locomotion along arbitrary paths.
Footskate Cleanup for Motion Capture Editing
(Lucas Kovar, John Schreiner, and Michael Gleicher; SCA '02)
 While motion capture is commonplace in character animation, often the
raw motion data itself is not used. Rather, it is first fit onto a
skeleton and then edited to satisfy the particular demands of the
animation. This process can introduce artifacts into the motion. One
particularly distracting artifact is when the character's feet move
when they ought to remain planted, a condition known as footskate. In
this work we present a simple, efficient algorithm for removing
footskate. Our algorithm exactly satisfies footplant constraints
without introducing disagreeable artifacts.
While motion capture is commonplace in character animation, often the
raw motion data itself is not used. Rather, it is first fit onto a
skeleton and then edited to satisfy the particular demands of the
animation. This process can introduce artifacts into the motion. One
particularly distracting artifact is when the character's feet move
when they ought to remain planted, a condition known as footskate. In
this work we present a simple, efficient algorithm for removing
footskate. Our algorithm exactly satisfies footplant constraints
without introducing disagreeable artifacts.
Simplicial Families of Drawings
(Lucas Kovar and Michael Gleicher; UIST '02)
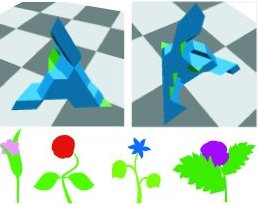 This work presents a method for helping artists make artwork
more accessible to casual users. We focus on the specific case of
drawings, showing how a small number of drawings can be transformed
into a richer object containing an entire family of similar drawings.
This object is represented as a simplicial complex approximating a set
of valid interpolations in configuration space. The artist does not
interact directly with the simplicial complex. Instead, she guides
its construction by answering a specially chosen set of yes/no
questions. By combining the topological generality of a simplicial
complex with direct human guidance, we are able to represent very
general constraints on membership in a family. The constructed
simplicial complex supports a variety of algorithms useful to an end
user, including random sampling of the space of drawings, constrained
interpolation between drawings, projection of another drawing into the
family, and interactive exploration of the family.
This work presents a method for helping artists make artwork
more accessible to casual users. We focus on the specific case of
drawings, showing how a small number of drawings can be transformed
into a richer object containing an entire family of similar drawings.
This object is represented as a simplicial complex approximating a set
of valid interpolations in configuration space. The artist does not
interact directly with the simplicial complex. Instead, she guides
its construction by answering a specially chosen set of yes/no
questions. By combining the topological generality of a simplicial
complex with direct human guidance, we are able to represent very
general constraints on membership in a family. The constructed
simplicial complex supports a variety of algorithms useful to an end
user, including random sampling of the space of drawings, constrained
interpolation between drawings, projection of another drawing into the
family, and interactive exploration of the family.

