Part II: Modifying and extending gem5¶
Setting up development environment¶
- Use the style guide
- Install the style guide
- Use mercurial queues (or git or whatever)
Simple SimObject¶
To come
Debugging gem5¶
To come
Event-driven programming¶
- Add an event wrapper to the HelloObject from last chapter.
- Add a processEvent function
hello_object.hh¶
private:
void processEvent();
EventWrapper<HelloObject, &HelloObject::processEvent> event;
- Initialize the event
- Implement the processEvent function
hello_object.cc¶
HelloObject::HelloObject(HelloObjectParams *params) :
SimObject(params), event(*this)
void
HelloObject::processEvent()
{
DPRINTF(Hello, "Hello world! Processing the event!\n");
}
- Add a startup function to the header
- Schedule an event
hello_object.hh¶
void startup();
hello_object.cc¶
void
HelloObject::startup()
{
schedule(event, 100);
}
- Recompile and run gem5
- Add two parameters to class: latency, timesLeft
hello_object.cc¶
HelloObject::HelloObject(HelloObjectParams *params) :
SimObject(params), event(*this), latency(100), timesLeft(10)
- update startup and process event
hello_object.cc¶
void
HelloObject::startup()
{
schedule(event, latency);
}
void
HelloObject::processEvent()
{
timesLeft--;
DPRINTF(Hello, "Hello world! Processing the event! %d left\n", timesLeft);
if (timesLeft <= 0) {
DPRINTF(Hello, "Done firing!\n");
} else {
schedule(event, curTick() + latency);
}
}
Adding parameters¶
- Talk about simple parameters
HelloObject.py¶
class HelloObject(SimObject):
type = 'HelloObject'
cxx_header = "learning_gem5/hello_object.hh"
time_to_wait = Param.Latency("Time before firing the event")
number_of_fires = Param.Int(1, "Number of times to fire the event before "
"goodbye")
- Update the constructor
hello_object.cc¶
HelloObject::HelloObject(HelloObjectParams *params) :
SimObject(params),
event(*this),
myName(params->name),
latency(params->time_to_wait),
timesLeft(params->number_of_fires)
{
DPRINTF(Hello, "Created the hello object with the name %s\n", myName);
}
- Run gem5 without updating the config file and get an error
- Fix the above error
run_hello.py¶
root.hello = HelloObject(time_to_wait = '2us')
- or
root.hello = HelloObject()
root.hello.time_to_wait = '2us'
- Run again
- Modify config to fire more than once
- Run again
root.hello.number_of_fires = 10
- Clear changes, add 2 patches to hello-4-goodbye
- Add a goodbye object to the python file
- Talk about what this object is going to do. It has a buffer that it fills at some maximum rate.
HelloObject.py¶
class GoodbyeObject(SimObject):
type = 'GoodbyeObject'
cxx_header = "learning_gem5/goodbye_object.hh"
buffer_size = Param.MemorySize('1kB',
"Size of buffer to fill with goodbye")
write_bandwidth = Param.MemoryBandwidth('100MB/s', "Bandwidth to fill "
"the buffer")
- Show “sayGoodbye” interface
goodbye_object.cc¶
void
GoodbyeObject::sayGoodbye(std::string other_name)
{
DPRINTF(Hello, "Saying goodbye to %s\n", other_name);
message = "Goodbye " + other_name + "!! ";
fillBuffer();
}
- Implement missing fillBuffer
goodbye_object.cc¶
if (bufferUsed < bufferSize - 1) {
// Wait for the next copy for as long as it would have taken
DPRINTF(Hello, "Scheduling another fillBuffer in %d ticks\n",
bandwidth * bytes_copied);
schedule(event, curTick() + bandwidth * bytes_copied);
} else {
DPRINTF(Hello, "Goodbye done copying!\n");
// Be sure to take into account the time for the last bytes
exitSimLoop(buffer, 0, curTick() + bandwidth * bytes_copied);
}
- Make changes to hello object
HelloObject.py¶
goodbye_object = Param.GoodbyeObject("A goodbye object")
hello_object.hh¶
GoodbyeObject& goodbye;
hello_object.cc¶
if (timesLeft <= 0) {
DPRINTF(Hello, "Done firing!\n");
goodbye.sayGoodbye(myName);
- Update the config script
run_hello.py¶
root.hello.goodbye_object = GoodbyeObject(buffer_size='100B')
- Run gem5
- Make other changes for examples
run_hello.py¶
root.hello = HelloObject(time_to_wait = '2us', number_of_fires = 5)
root.hello2 = HelloObject(time_to_wait = '2.5us', number_of_fires = 3)
root.goodbye = GoodbyeObject(buffer_size = '30B')
root.goodbye2 = GoodbyeObject(buffer_size = '30B')
root.hello.goodbye_object = root.goodbye2
root.hello2.goodbye_object = root.goodbye
- Run gem5
MemObjects¶
- Show slides about master/slave and packets
- packets * Request (addr, requestor) * command (can change) * size * data (pointer)
- port interface
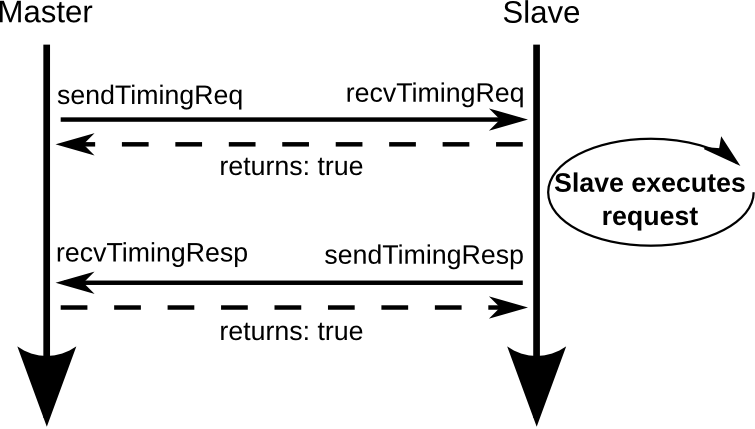
Simple master-slave interaction when both can accept the request and the response.

Simple master-slave interaction when the slave is busy
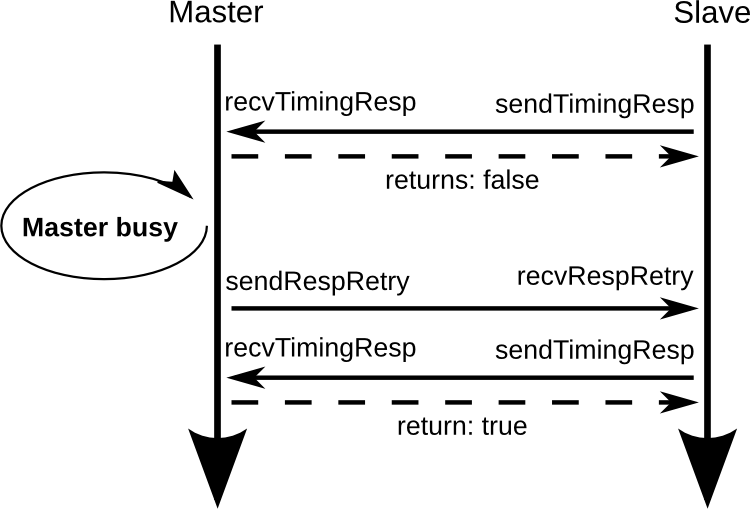
Simple master-slave interaction when the master is busy
- Make the SConscript file
Sconscript¶
Import('*')
SimObject('SimpleMemobj.py')
Source('simple_memobj.cc')
DebugFlag('SimpleMemobj')
- Create a simple memobj description
SimpleMemobj.py¶
from m5.params import *
from m5.proxy import *
from MemObject import MemObject
class SimpleMemobj(MemObject):
type = 'SimpleMemobj'
cxx_header = "learning_gem5/simple_memobj/simple_memobj.hh"
inst_port = SlavePort("CPU side port, receives requests")
data_port = SlavePort("CPU side port, receives requests")
mem_side = MasterPort("Memory side port, sends requests")
- Define the header file
- Point out “public MemObject”
simple_memobj.hh¶
#ifndef __LEARNING_GEM5_SIMPLE_MEMOBJ_SIMPLE_MEMOBJ_HH__
#define __LEARNING_GEM5_SIMPLE_MEMOBJ_SIMPLE_MEMOBJ_HH__
#include "mem/mem_object.hh"
#include "params/SimpleMemobj.hh"
class SimpleMemobj : public MemObject
{
private:
public:
/** constructor
*/
SimpleMemobj(SimpleMemobjParams *params);
};
#endif
- Define the CPU-side slave port
- Talk about each of the functions below
simple_memobj.hh¶
class CPUSidePort : public SlavePort
{
private:
SimpleMemobj *owner;
public:
CPUSidePort(const std::string& name, SimpleMemobj *owner) :
SlavePort(name, owner), owner(owner)
{ }
AddrRangeList getAddrRanges() const override;
protected:
Tick recvAtomic(PacketPtr pkt) override { panic("recvAtomic unimpl."); }
void recvFunctional(PacketPtr pkt) override;
bool recvTimingReq(PacketPtr pkt) override;
void recvRespRetry() override;
};
- define the memory side master port
- Talk about each of the functions below
simple_memobj.hh¶
class MemSidePort : public MasterPort
{
private:
SimpleMemobj *owner;
public:
MemSidePort(const std::string& name, SimpleMemobj *owner) :
MasterPort(name, owner), owner(owner)
{ }
protected:
bool recvTimingResp(PacketPtr pkt) override;
void recvReqRetry() override;
void recvRangeChange() override;
};
- Define the MemObject interface
simple_memobj.hh¶
class SimpleMemobj : public MemObject
{
private:
<CPUSidePort declaration>
<MemSidePort declaration>
CPUSidePort instPort;
CPUSidePort dataPort;
MemSidePort memPort;
public:
SimpleMemobj(SimpleMemobjParams *params);
BaseMasterPort& getMasterPort(const std::string& if_name,
PortID idx = InvalidPortID) override;
BaseSlavePort& getSlavePort(const std::string& if_name,
PortID idx = InvalidPortID) override;
};
- Initialize things in construcutor
simple_memobj.cc¶
SimpleMemobj::SimpleMemobj(SimpleMemobjParams *params) :
MemObject(params),
instPort(params->name + ".inst_port", this),
dataPort(params->name + ".data_port", this),
memPort(params->name + ".mem_side", this),
{
}
- Implement getMasterPort
simple_memobj.cc¶
BaseMasterPort&
SimpleMemobj::getMasterPort(const std::string& if_name, PortID idx)
{
if (if_name == "mem_side") {
return memPort;
} else {
return MemObject::getMasterPort(if_name, idx);
}
}
- Implement getSlavePort
simple_memobj.cc¶
BaseSlavePort&
SimpleMemobj::getSlavePort(const std::string& if_name, PortID idx)
{
if (if_name == "inst_port") {
return instPort;
} else if (if_name == "data_port") {
return dataPort;
} else {
return MemObject::getSlavePort(if_name, idx);
}
}
- Pass through some of the functions for CPU side port
simple_memobj.cc¶
AddrRangeList
SimpleMemobj::CPUSidePort::getAddrRanges() const
{
return owner->getAddrRanges();
}
void
SimpleMemobj::CPUSidePort::recvFunctional(PacketPtr pkt)
{
return owner->handleFunctional(pkt);
}
void
SimpleMemobj::handleFunctional(PacketPtr pkt)
{
memPort.sendFunctional(pkt);
}
AddrRangeList
SimpleMemobj::getAddrRanges() const
{
DPRINTF(SimpleMemobj, "Sending new ranges\n");
return memPort.getAddrRanges();
}
- Pass through some of the functions for Mem side port
simple_memobj.cc¶
void
SimpleMemobj::MemSidePort::recvRangeChange()
{
owner->sendRangeChange();
}
void
SimpleMemobj::sendRangeChange()
{
instPort.sendRangeChange();
dataPort.sendRangeChange();
}
- NOw the fun part. Implementing the send/receives
- Let’s start with receive
simple_memobj.cc¶
bool
SimpleMemobj::CPUSidePort::recvTimingReq(PacketPtr pkt)
{
if (!owner->handleRequest(pkt)) {
needRetry = true;
return false;
} else {
return true;
}
}
- Now, we need to do handle request
simple_memobj.cc¶
bool
SimpleMemobj::handleRequest(PacketPtr pkt)
{
if (blocked) {
return false;
}
DPRINTF(SimpleMemobj, "Got request for addr %#x\n", pkt->getAddr());
blocked = true;
memPort.sendPacket(pkt);
return true;
}
- Let’s add a convienency function in the memside port
simple_memobj.cc¶
void
SimpleMemobj::MemSidePort::sendPacket(PacketPtr pkt)
{
panic_if(blockedPacket != nullptr, "Should never try to send if blocked!");
if (!sendTimingReq(pkt)) {
blockedPacket = pkt;
}
}
simple_memobj.hh¶
class MemSidePort : public MasterPort {
PacketPtr blockedPacket;
public:
void sendPacket(PacketPtr pkt);
- Implement code to handle retries
simple_memobj.cc¶
void
SimpleMemobj::MemSidePort::recvReqRetry()
{
assert(blockedPacket != nullptr);
PacketPtr pkt = blockedPacket;
blockedPacket = nullptr;
sendPacket(pkt);
}
- Implement the code for receiving requests
simple_memobj.cc¶
bool
SimpleMemobj::CPUSidePort::recvTimingReq(PacketPtr pkt)
{
if (!owner->handleRequest(pkt)) {
needRetry = true;
return false;
} else {
return true;
}
}
- Add variable to remember when we need to send the CPU a retry
simple_memobj.hh¶
class CPUSidePort : public SlavePort
{
bool needRetry;
simple_memobj.cc¶
bool
SimpleMemobj::handleResponse(PacketPtr pkt)
{
assert(blocked);
DPRINTF(SimpleMemobj, "Got response for addr %#x\n", pkt->getAddr());
blocked = false;
// Simply forward to the memory port
if (pkt->req->isInstFetch()) {
instPort.sendPacket(pkt);
} else {
dataPort.sendPacket(pkt);
}
return true;
}
- Now, we need the convience function to send packets
simple_memobj.hh¶
class CPUSidePort : public SlavePort
{
PacketPtr blockedPacket;
public:
void sendPacket(PacketPtr pkt);
simple_memobj.cc¶
void
SimpleMemobj::CPUSidePort::sendPacket(PacketPtr pkt)
{
panic_if(blockedPacket != nullptr, "Should never try to send if blocked!");
if (!sendTimingResp(pkt)) {
blockedPacket = pkt;
}
}
- Implement recvRespRetry
simple_memobj.cc¶
void
SimpleMemobj::CPUSidePort::recvRespRetry()
{
assert(blockedPacket != nullptr);
PacketPtr pkt = blockedPacket;
blockedPacket = nullptr;
sendPacket(pkt);
}
- Implement trySendRetry
simple_memobj.hh¶
class CPUSidePort : public SlavePort {
void trySendRetry();
simple_memobj.cc¶
void
SimpleMemobj::CPUSidePort::trySendRetry()
{
if (needRetry && blockedPacket == nullptr) {
needRetry = false;
DPRINTF(SimpleMemobj, "Sending retry req for %d\n", id);
sendRetryReq();
}
}
simple_memobj.cc¶
SimpleMemobj::handleResponse(PacketPtr pkt)
{
instPort.trySendRetry();
dataPort.trySendRetry();
- Update simple config file
simple.py¶
system.cpu = TimingSimpleCPU()
system.memobj = SimpleMemobj()
system.cpu.icache_port = system.memobj.inst_port
system.cpu.dcache_port = system.memobj.data_port
system.membus = SystemXBar()
system.memobj.mem_side = system.membus.slave
- Run simple.py
Making a cache¶
- Add parameters to memobj
SimpleMemobj.py¶
latency = Param.Cycles(1, "Cycles taken on a hit or to resolve a miss")
size = Param.MemorySize('16kB', "The size of the cache")
system = Param.System(Parent.any, "The system this cache is part of")
- Talk about the parent.any proxy parameter
- Add latency/size/system to constructor
simple_memobj.cc¶
latency(params->latency),
blockSize(params->system->cacheLineSize()),
capacity(params->size / blockSize),
- Implement new “handleRequest”
simple_memobj.cc¶
bool
SimpleMemobj::handleRequest(PacketPtr pkt, int port_id)
{
if (blocked) {
return false;
}
DPRINTF(SimpleMemobj, "Got request for addr %#x\n", pkt->getAddr());
blocked = true;
waitingPortId = port_id;
schedule(new AccessEvent(this, pkt), clockEdge(latency));
return true;
}
- Talk about the clockEdge function and clocked-objects
- Implement the access event
simple_memobj.hh¶
class AccessEvent : public Event
{
private:
SimpleMemobj *cache;
PacketPtr pkt;
public:
AccessEvent(SimpleMemobj *cache, PacketPtr pkt) :
Event(Default_Pri, AutoDelete), cache(cache), pkt(pkt)
{ }
void process() override {
cache->accessTiming(pkt);
}
};
- Implement the accessTiming function
simple_memobj.hh¶
void accessTiming(PacketPtr pkt);
simple_memobj.cc¶
void
SimpleMemobj::accessTiming(PacketPtr pkt)
{
bool hit = accessFunctional(pkt);
if (hit) {
pkt->makeResponse();
sendResponse(pkt);
} else {
<miss handling>
}
}
- Note; It’s a good idea to separate out functional from timing functions
- Miss handling is complicated by the block size
simple_memobj.cc¶
void
SimpleMemobj::accessTiming(PacketPtr pkt)
{
bool hit = accessFunctional(pkt);
if (hit) {
pkt->makeResponse();
sendResponse(pkt);
} else {
Addr addr = pkt->getAddr();
Addr block_addr = pkt->getBlockAddr(blockSize);
unsigned size = pkt->getSize();
if (addr == block_addr && size == blockSize) {
DPRINTF(SimpleMemobj, "forwarding packet\n");
memPort.sendPacket(pkt);
} else {
DPRINTF(SimpleMemobj, "Upgrading packet to block size\n");
panic_if(addr - block_addr + size > blockSize,
"Cannot handle accesses that span multiple cache lines");
assert(pkt->needsResponse());
MemCmd cmd;
if (pkt->isWrite() || pkt->isRead()) {
cmd = MemCmd::ReadReq;
} else {
panic("Unknown packet type in upgrade size");
}
PacketPtr new_pkt = new Packet(pkt->req, cmd, blockSize);
new_pkt->allocate();
outstandingPacket = pkt;
memPort.sendPacket(new_pkt);
}
}
}
simple_memobj.hh¶
PacketPtr outstandingPacket;
- Update handle response to be able to accept responses from the upgraded packets
simple_memobj.cc¶
bool
SimpleMemobj::handleResponse(PacketPtr pkt)
{
assert(blocked);
DPRINTF(SimpleMemobj, "Got response for addr %#x\n", pkt->getAddr());
insert(pkt);
if (outstandingPacket != nullptr) {
accessFunctional(outstandingPacket);
outstandingPacket->makeResponse();
delete pkt;
pkt = outstandingPacket;
outstandingPacket = nullptr;
} // else, pkt contains the data it needs
sendResponse(pkt);
return true;
}
- Implementing the functional cache logic, now.
simple_memobj.hh¶
void insert(PacketPtr pkt);
bool accessFunctional(PacketPtr pkt);
std::unordered_map<Addr, uint8_t*> cacheStore;
- Implement the access logic
simple_memobj.cc¶
bool
SimpleMemobj::accessFunctional(PacketPtr pkt)
{
Addr block_addr = pkt->getBlockAddr(blockSize);
auto it = cacheStore.find(block_addr);
if (it != cacheStore.end()) {
if (pkt->isWrite()) {
pkt->writeDataToBlock(it->second, blockSize);
} else if (pkt->isRead()) {
pkt->setDataFromBlock(it->second, blockSize);
} else {
panic("Unknown packet type!");
}
return true;
}
return false;
}
- Implement the insert logic
simple_memobj.cc¶
void
SimpleMemobj::insert(PacketPtr pkt)
{
if (cacheStore.size() >= capacity) {
// Select random thing to evict. This is a little convoluted since we
// are using a std::unordered_map. See http://bit.ly/2hrnLP2
int bucket, bucket_size;
do {
bucket = random_mt.random(0, (int)cacheStore.bucket_count() - 1);
} while ( (bucket_size = cacheStore.bucket_size(bucket)) == 0 );
auto block = std::next(cacheStore.begin(bucket),
random_mt.random(0, bucket_size - 1));
RequestPtr req = new Request(block->first, blockSize, 0, 0);
PacketPtr new_pkt = new Packet(req, MemCmd::WritebackDirty, blockSize);
new_pkt->dataDynamic(block->second); // This will be deleted later
DPRINTF(SimpleMemobj, "Writing packet back %s\n", pkt->print());
memPort.sendTimingReq(new_pkt);
cacheStore.erase(block->first);
}
uint8_t *data = new uint8_t[blockSize];
cacheStore[pkt->getAddr()] = data;
pkt->writeDataToBlock(data, blockSize);
}
- update the config file
