Results
0 - Find Correspondence using the KLT feature point tracker.
1 - Determine the Fundamental Matrix, F.
2 - Recify images using F.
3 - Apply Birchfield and Tomasi calibated stereo correspondence algorithm to
create a depth map.
4 - If the depth map generated is bad, determine new correspondence points by
searching the space near the epipolar lines determine originally.
5 - Repeat from step 1, using the new correspondence points.
- Ignore tracking data and run RANSAC to find a fundamental matrix that is consitent. That is, that each feature in one image has another feature in the other image that lies near the epipolar line. Unfortunately, since it is highly probable that some feature will lie near a given epipolar line, this also has poor results.
- Like #1, use RANSAC, but only score how close a feature that KLT succesfully tracked is to the epipolar lines. Again, this gave poor results, since a few poorly tracked features would score well.
- Again using RANSAC, find the best fundamental matrix that is internally consistent. That is, do not score using all features, or all tracked features, but only those used to determine the fundamental matrix in the first place. In this case, use more than 8 points for calculating F, so that F is simply an approximation to those points. Again, a few bad correspondences appear in well scoring sets.
-
A method proposed by M. Pilu.
This method first generates a pairwise proximity matrix between all
features, using pixel position and a local normalized cross correlation.
The SVD of this matrix is taken, and the diagonal values are set to 1.
Once multiplied back together, we are given a scoring matrix between pairwise
correspondences. Pilu uses this matrix to find correspondences between
all pairs, however we are only interested in a few, best correspondences.
We therefore pick the best N scoring correspondences to use for tracking.
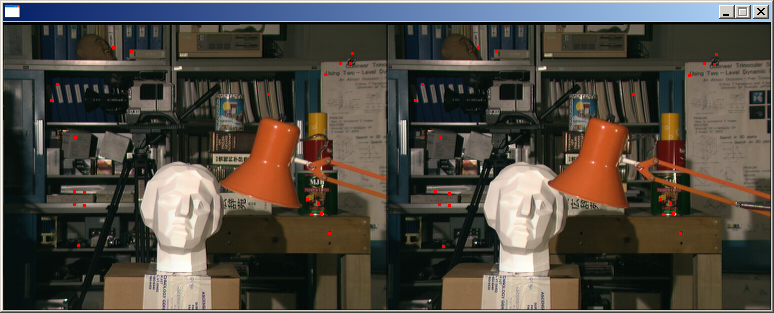
Good correspondences tend not to be well distributed throughout the image. This increases the error in later steps, since the determined fundamental matrix tends to be inaccurate for finding epipolar lines far from the tracked features. To avoid this, we split the image into fourths, and run tracking and correspondence on each smaller image. This distributes the correspondences while still giving us good matches.
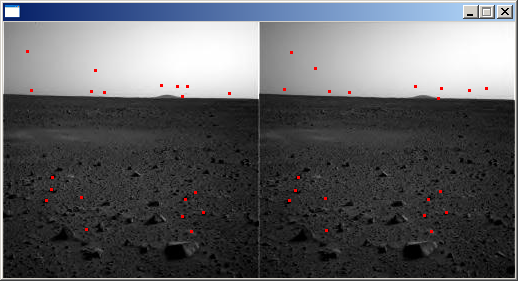
Note that this will still produce bad results in regions where poor features have been detected as seen in the sky of this pair of mars images.
Step 1 Determine the Fundamental Matrix, F
OpenCV provides a method for this calculation. A good discussion of
the 8-point algorithm is given by
Hartley. Note that this calculation is very much sensitive to
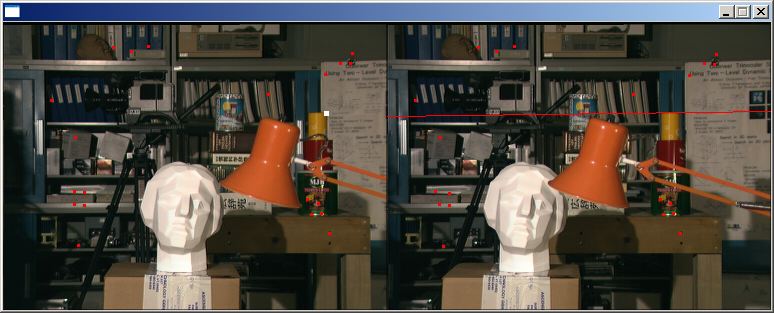
noise. For example, the following image is a parallel stereo pair.
In other words, all epipolar lines should be horizontal. Note
that almost all points are tracked reasonably, however if we examine the
epipolar line that corresponds to the top-left of the box (white square), it is
not horizontal and misses the point in the corresponding image.
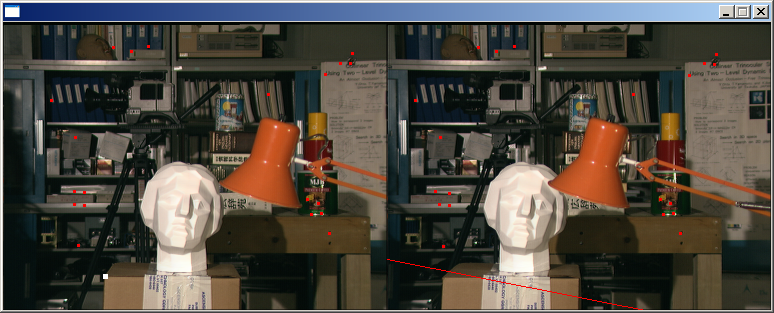
The calculated fundamental matrix provides much better results in other parts
of the image
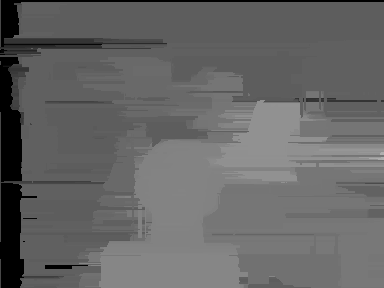
Step 3 - Apply Birchfield and Tomasi calibated stereo correspondence algorithm to
create a depth map
Birchfield and Tomasi use a dynamic programming method to determine
disparity given two rectified images. Essentially, they perform a global
sequence alignment between each pair of lines. This method is provided by
openCV. Perfectly rectified images give the depth image below. This
image has been brightness enhanced.