Prev: L22, Next: L24
Zoom: Link, Piazza: Link, Google Form: Link.
Wisc ID for in-class quiz: (if your wisc email is "test@wisc.edu", please enter "test")
Token: (will be given during the lectures)
23
id,answer_id;token,answer_check
# Deep Q Learning
📗 In practice, Q function stored as a table is too large if the number of states is large or infinite (the action space is usually finite): Link, Link, Wikipedia.
📗 If there are \(m\) binary features that represent the state, then the Q table contains \(2^{m} \left| A \right|\), which can be intractable.
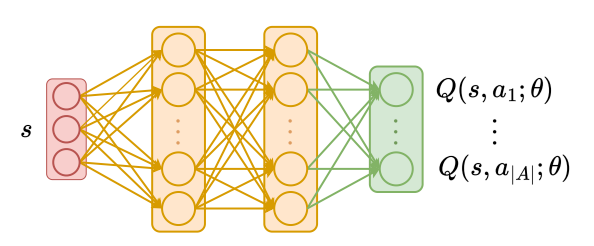
📗 In this case, a neural network can be used to store the Q function, and if there is a single layer with \(m\) units, then only \(m^{2} + m \left| A \right|\) weights are needed.
➩ The input of the network \(\hat{Q}\) is the features of the state \(s\), and the outputs of the network are Q values associated with the actions \(a\) or \(Q\left(s, a\right)\) (the output layer does not need to be softmax since the Q values for different actions do not need to sum up to \(1\)).
➩ After every iteration, the network can be updated based on an item \(\left(s_{t}, \left(1 - \alpha\right) \hat{Q}\left(s_{t}, a_{t}\right) + \alpha \left(r_{t} + \beta \displaystyle\max_{a} \hat{Q}\left(s_{t+1}, a\right)\right)\right)\).
# Deep Q Network
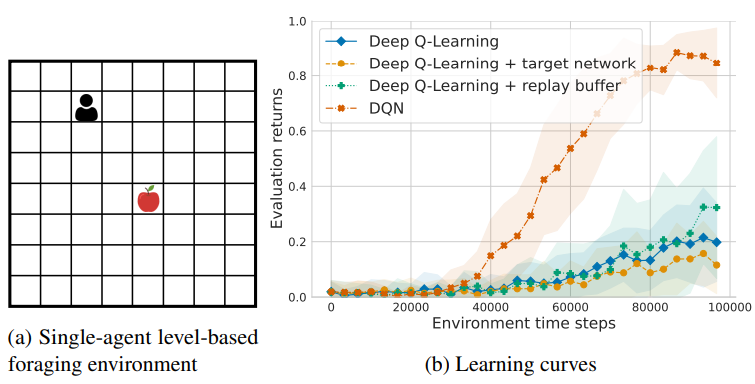
📗 Deep Q Learning algorithm is unstable since the training label uses the network itself. The following improvements can be made to make the algorithm more stable, called DQN (Deep Q Network).
➩ Target network: two networks can be used, the Q network \(\hat{Q}\) and the target network \(Q'\), and the new item for training \(\hat{Q}\) can be changed to \(\left(s_{t}, \left(1 - \alpha\right) Q'\left(s_{t}, a_{t}\right) + \alpha \left(r_{t} + \beta \displaystyle\max_{a} Q'\left(s_{t+1}, a\right)\right)\right)\).
➩ Experience replay: some training data can be saved and a mini-batch (sampled from the training set) can be used to update \(\hat{Q}\) instead of a single item.
Example
# Policy Gradient
📗 Deep Q Network estimates the Q function as a neural network, and the policy can be computed as \(\pi\left(s\right) = \mathop{\mathrm{argmax}}_{a} \hat{Q}\left(s, a\right)\), which is always deterministic.
➩ In single-agent reinforcement learning, there is always a deterministic optimal policy, so DQN can be used to solve for an optimal policy.
➩ In multi-agent reinforcement learning, the optimal equilibrium policy can be all stochastic (mixed strategy equilibrium): Wikipedia.
📗 The policy can also be represented by a neural network called the policy network \(\hat{\pi}\) and it can be trained with or without using a value network \(\hat{V}\).
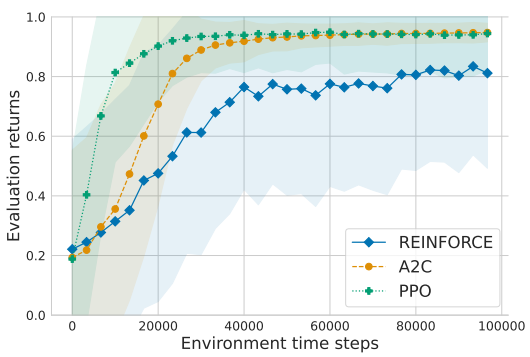
➩ Without a value network: REINFORCE (REward Increment = Non-negative Factor x Offset x Characteristic Eligibility).
➩ With a value network: A2C (Advantage Actor Critic) and PPO (Proximal Policy Optimization).
📗 To train the policy network \(\hat{\pi}\), the input is the features of the state \(s\) and the output units (softmax output layer) are the probability of using each action \(a\) or \(\mathbb{P}\left\{\pi\left(s\right) = a\right\}\). The cost function the network minimizes can be value function (REINFORCE) or the advantage function (difference between value and Q, A2C and PPO).
📗 The value network is trained in a way similar to DQN.
Example
Math Note (Optional)
📗 Policy gradient theorem: \(\nabla_{w} V\left(w\right) = \mathbb{E}\left[Q^{\hat{\pi}}\left(s, a\right) \nabla_{w} \log \hat{\pi}\left(a | s; w\right)\right]\)
➩ Given this gradient formula, the loss for the policy network in REINFORCE can be written as \(\left(\displaystyle\sum_{t'=t+1}^{T} \beta^{t'-t-1} r_{t'}\right) \log \pi\left(a_{t} | s_{t} ; w\right)\), where \(\displaystyle\sum_{t'=t+1}^{T} \beta^{t'-t-1} r_{t'}\) is an estimate of \(Q^{\hat{\pi}}\left(s_{t}, a_{t}\right)\).
➩ The loss for the policy network in A2C is \(-\left(r_{t} + \beta \hat{V}\left(s_{t+1}\right) - \hat{V}\left(s_{t}\right)\right) \log \pi\left(a_{t} | s_{t} ; w\right)\), where \(r_{t} + \beta \hat{V}\left(s_{t+1}\right) - \hat{V}\left(s_{t}\right)\) is an estimate of the advantage function \(Q^{\hat{\pi}}\left(s_{t}, a_{t}\right) - V^{\hat{\pi}}\left(s_{t}\right)\).
# Questions?
📗 If you have questions, please use (i) Zoom chat, (ii) Piazza: Link, (iii) Office hours and discussion sessions. Please do NOT use Canvas mail and use email only to the course instructor (not TAs) for grading issues.
Additional In-class Discussion
📗 Sometimes a question not in the notes will be asked during the lecture, you can submit your answer here:
Notes (not visible to other students):
[Q1]
Submit your answer to see other students answers (click the submit button to refresh):
Additional In-class Quiz
📗 Sometimes a question not in the notes will be asked during the lecture, you can submit your answer here:
A. B.
C.
D.
E.
Notes (not visible to other students):
[Q2]
Submit your answer to see other students answers (click the submit button to refresh):
test q https://script.google.com/macros/s/AKfycbyiidUAdiLc3YrKgOAM6T95ATulwDQxQilWVv1bK1L5sKRl8ozXfVs4PjCC2VtMWcIBpg/exec
# In-class Quiz Instructions
📗 To get full points on the in-class quizzes for a lecture:
➩ Submit relevant answers to the questions discussed during the lecture: incorrect answers are okay.
➩ Some questions require [notes] to earn the point.
➩ Some questions require special ID (given during the lecture) to earn the point.
➩ Do not submit answers to questions that are not discussed during the lectures. Each such submission will result in a deduction of one point.
➩ Submissions after the lecture, before the midterm (first 14 lectures) and the final exam (last 14 lectures), are accepted. After the exams, no in-class quiz submissions will be accepted.
➩ The grade on Canvas Assignment Q23 is computed as number of points divided by the number of questions asked (out of 1) and updated on Canvas every weekend.
📗 If there are any issues with submission on the website, please use this Google form: Link.
📗 Bonus point opportunities during a few lectures (added to in-class quiz above 20 points).
📗 Notes and code adapted from the course taught by Professors Jerry Zhu, Blerina Gkotse, Yudong Chen, Yingyu Liang, Charles Dyer. Some content are generated using Copilot .
Prev: L22, Next: L24
Last Updated: July 22, 2026 at 12:40 PM