#include <QpGenLinsys.h>
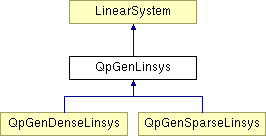
Inheritance diagram for QpGenLinsys:
Public Methods | |
| virtual void | factor (Data *prob, Variables *vars) |
| virtual void | solve (Data *prob, Variables *vars, Residuals *res, Variables *step) |
| virtual void | joinRHS (OoqpVector &rhs, OoqpVector &rhs1, OoqpVector &rhs2, OoqpVector &rhs3) |
| virtual void | separateVars (OoqpVector &vars1, OoqpVector &vars2, OoqpVector &vars3, OoqpVector &vars) |
| virtual void | solveXYZS (OoqpVector &stepx, OoqpVector &stepy, OoqpVector &stepz, OoqpVector &steps, OoqpVector &ztemp, QpGenData *data) |
| virtual void | solveCompressed (OoqpVector &rhs)=0 |
| virtual void | putXDiagonal (OoqpVector &xdiag)=0 |
| virtual void | putZDiagonal (OoqpVector &zdiag)=0 |
| virtual void | computeDiagonals (OoqpVector &dd, OoqpVector &omega, OoqpVector &t, OoqpVector &lambda, OoqpVector &u, OoqpVector &pi, OoqpVector &v, OoqpVector &gamma, OoqpVector &w, OoqpVector &phi) |
Protected Attributes | |
| OoqpVectorHandle | nomegaInv |
| OoqpVectorHandle | rhs |
| int | nx |
| int | my |
| int | mz |
| OoqpVectorHandle | dd |
| OoqpVectorHandle | dq |
| OoqpVectorHandle | ixupp |
| OoqpVectorHandle | icupp |
| OoqpVectorHandle | ixlow |
| OoqpVectorHandle | iclow |
| int | nxupp |
| int | nxlow |
| int | mcupp |
| int | mclow |
|
||||||||||||||||||||||||||||||||||||||||||||
|
computes the diagonal matrices in the augmented system from the current set of variables |
|
||||||||||||
|
sets up the matrix for the main linear system in "augmented system" form. The actual factorization is performed by a routine specific to either the sparse or dense case.
Implements LinearSystem. Reimplemented in QpGenDenseLinsys, and QpGenSparseLinsys. |
|
||||||||||||||||||||
|
assembles a single vector object from three given vectors
|
|
|
places the diagonal resulting from the bounds on x into the augmented system matrix Implemented in QpGenDenseLinsys, and QpGenSparseLinsys. |
|
|
places the diagonal resulting from the bounds on Cx into the augmented system matrix Implemented in QpGenDenseLinsys, and QpGenSparseLinsys. |
|
||||||||||||||||||||
|
extracts three component vectors from a given aggregated vector.
|
|
||||||||||||||||||||
|
solves the system for a given set of residuals. Assembles the right-hand side appropriate to the matrix factored in factor, solves the system using the factorization produced there, partitions the solution vector into step components, then recovers the step components eliminated during the block elimination that produced the augmented system form
Implements LinearSystem. |
|
|
perform the actual solve using the factors produced in factor.
Implemented in QpGenDenseLinsys, and QpGenSparseLinsys. |
|
||||||||||||||||||||||||||||
|
assemble right-hand side of augmented system and call solveCompressed to solve it |
|
|
temporary storage vectors |
|
|
temporary storage vectors |
|
|
index matrices for the upper and lower bounds on x and Cx |
|
|
index matrices for the upper and lower bounds on x and Cx |
|
|
index matrices for the upper and lower bounds on x and Cx |
|
|
index matrices for the upper and lower bounds on x and Cx |
|
|
dimensions of the upper and lower bound vectors |
|
|
dimensions of the upper and lower bound vectors |
|
|
dimensions of the vectors in the general QP formulation |
|
|
dimensions of the vectors in the general QP formulation |
|
|
stores a critical diagonal matrix as a vector |
|
|
dimensions of the vectors in the general QP formulation |
|
|
dimensions of the upper and lower bound vectors |
|
|
dimensions of the upper and lower bound vectors |
|
|
right-hand side of the system |
 1.2.18
1.2.18