Public Member Functions |
| void | onUnitCreate (BWAPI::Unit *u) |
| void | onUnitDestroy (BWAPI::Unit *u) |
| void | onUnitShow (BWAPI::Unit *u) |
| void | onUnitHide (BWAPI::Unit *u) |
| void | justStormed (BWAPI::Position p) |
| void | pathfind (BayesianUnit *ptr, BWAPI::Unit *u, BWAPI::TilePosition start, BWAPI::TilePosition end) |
| | Helper function for registering a building aware pathfinding task.
|
| void | threatAwarePathfind (BayesianUnit *ptr, BWAPI::Unit *u, BWAPI::TilePosition start, BWAPI::TilePosition end, int damages) |
| | Helper function for registering a damages aware pathfinding task (NOT buildings aware, perhaps change...)
|
| void | cancelPathfind (BayesianUnit *ptr) |
const std::vector
< BWAPI::TilePosition > & | getPathFromHomeToSL (BWTA::BaseLocation *b) |
| void | update () |
const std::map< BWAPI::Unit
*, BWAPI::Position > & | getOurUnits () |
const std::map< BWAPI::Unit
*, BWAPI::Position > & | getTrackedUnits () |
const std::map< BWAPI::Bullet
*, BWAPI::Position > & | getTrackedStorms () |
| BWAPI::Position | closestWalkabableSameRegionOrConnected (BWAPI::Position p) |
| BWAPI::TilePosition | closestWalkabableSameRegionOrConnected (BWAPI::TilePosition tp) |
| bool | isBTWalkable (int x, int y) |
| bool | isBTWalkable (const BWAPI::TilePosition &tp) |
| void | drawBuildings () |
| void | drawBuildingsStrict () |
| void | drawWalkability () |
| void | drawLowResWalkability () |
| void | drawLowResBuildings () |
| void | drawGroundDamages () |
| void | drawAirDamages () |
| void | drawGroundDamagesGrad () |
| void | drawAirDamagesGrad () |
| void | drawBestStorms () |
Public Attributes |
| bool * | walkability |
| bool * | buildings_wt |
| bool * | buildings |
| int * | groundDamages |
| int * | airDamages |
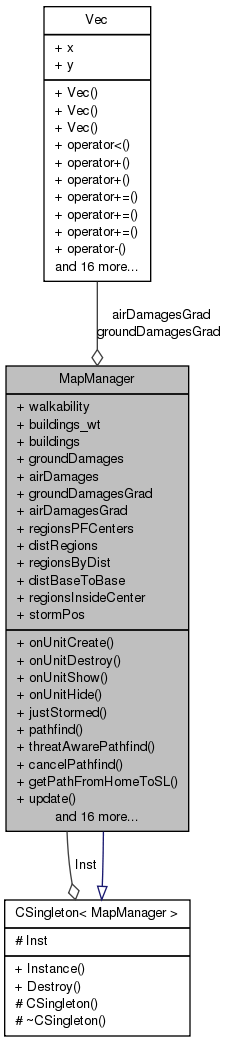
| Vec * | groundDamagesGrad |
| Vec * | airDamagesGrad |
std::map< BWTA::Region
*, BWAPI::Position > | regionsPFCenters |
std::map< BWTA::Region
*, std::map< BWTA::Region
*, double > > | distRegions |
std::map< BWTA::Region
*, std::map< double,
BWTA::Region * > > | regionsByDist |
std::map< BWTA::BaseLocation
*, std::map
< BWTA::BaseLocation *, double > > | distBaseToBase |
std::map< BWTA::Region
*, BWAPI::TilePosition > | regionsInsideCenter |
| std::map< Position, int > | stormPos |
Friends |
| class | CSingleton< MapManager > |
From BWAPI's doc: Positions are measured in pixels and are the highest resolution Walk Tiles - each walk tile is an 8x8 square of pixels. These are called walk tiles because walkability data is available at this resolution. Build Tiles - each build tile is a 4x4 square of walk tiles, or a 32x32 square of pixels. These are called build tiles because buildability data is available at this resolution.
Update stormPos
Prepare for the next update of _stormPosBuf thread
Launch the update of storms pos by unlocking the thread (waiting on this mutex)
Update the pathfinder
Fetch results if there are some
Prepare the next currentPathfindWork
Create the thread if it doesn't exist
Signal the pathfinder thread of incoming work













 1.7.6.1
1.7.6.1

