|
BWAPI
|
|
BWAPI
|
#include <PathFinder.h>
Public Member Functions | |
| BuildTilePath | CreateTilePath (TilePosition start, TilePosition target, std::tr1::function< bool(TilePosition)> tileTest=DefaultTileTest(), std::tr1::function< int(TilePosition, TilePosition, int)> gFunction=DefaultGValue(), std::tr1::function< int(TilePosition, TilePosition)> hFunction=DefaultHValue(), int maxGValue=0, bool diaganol=false) |
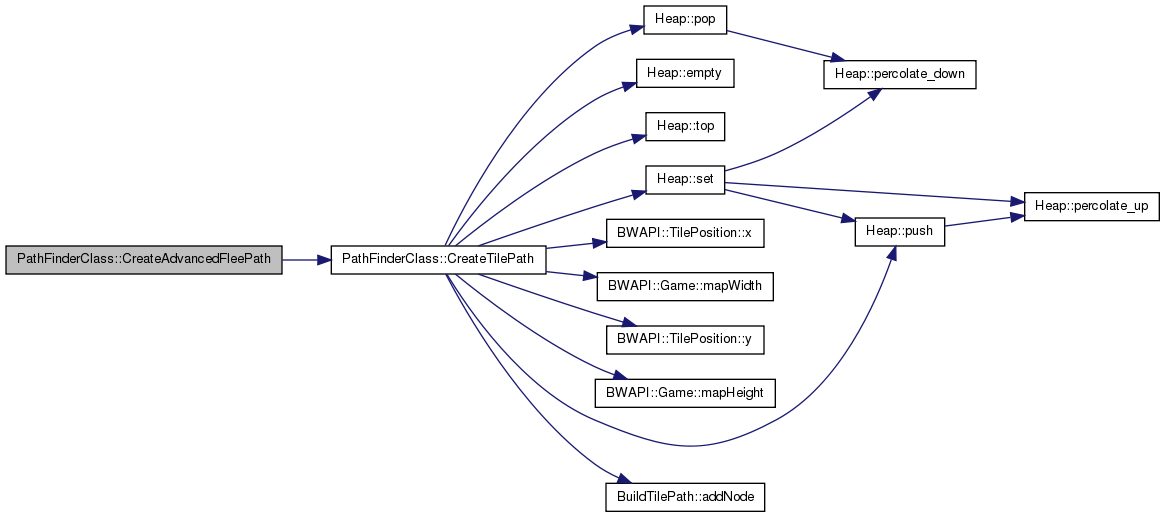
| BuildTilePath | CreateAdvancedFleePath (TilePosition start, const UnitGroup &enemies, bool stickToRegion=false) |
| RegionPath | CreateRegionPath (Region start, Region target) |
| PositionPath | CreateCheapWalkPath (Position start, Position target) |
| WalkPositionPath | CreateWalkPath (WalkPosition start, WalkPosition target, std::tr1::function< bool(WalkPosition)> tileTest=DefaultWalkTest(), std::tr1::function< int(WalkPosition, WalkPosition, int)> gFunction=DefaultWalkGValue(), std::tr1::function< int(WalkPosition, WalkPosition)> hFunction=DefaultWalkHValue(), int maxGValue=0, bool diaganol=false) |
Definition at line 79 of file PathFinder.h.
| BuildTilePath PathFinderClass::CreateAdvancedFleePath | ( | TilePosition | start, |
| const UnitGroup & | enemies, | ||
| bool | stickToRegion = false |
||
| ) |
Definition at line 138 of file PathFinder.cpp.
References CreateTilePath(), and BWAPI::TilePositions::None.
{
return CreateTilePath(start, BWAPI::TilePositions::None, FleeTileTest(stickToRegion, start), FleeGValue(), FleeHValue(enemies), 20, false);
}
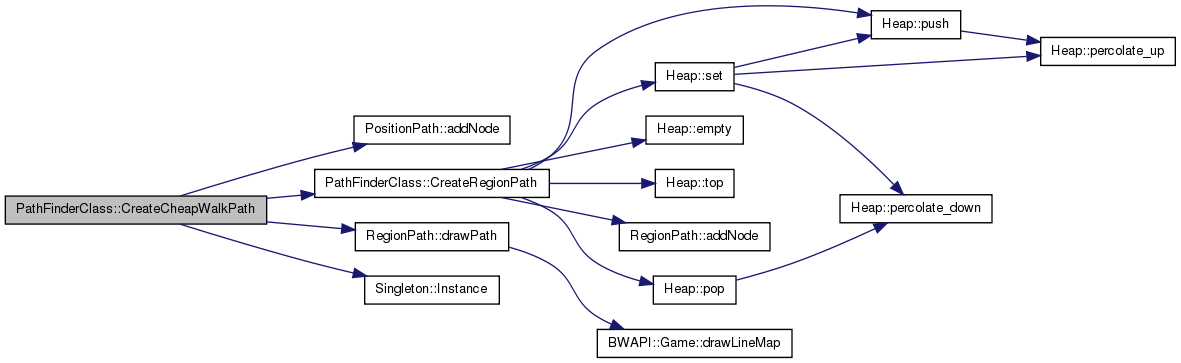
| PositionPath PathFinderClass::CreateCheapWalkPath | ( | Position | start, |
| Position | target | ||
| ) |
Definition at line 200 of file PathFinder.cpp.
References PositionPath::addNode(), BWAPI::Broodwar, CreateRegionPath(), RegionPath::drawPath(), Singleton< T >::Instance(), PositionPath::isComplete, RegionPath::isComplete, and PositionPath::path.
{
if(!BWAPI::Broodwar->hasPath(start, target))
return PositionPath();
Region startRegion = TerrainAnaysis::Instance().getRegion(TilePosition(start));
Region endRegion = TerrainAnaysis::Instance().getRegion(TilePosition(target));
PositionPath path;
if(startRegion == endRegion)
{
path.addNode(target);
path.addNode(start);
path.isComplete = true;
return path;
}
RegionPath regionPath = CreateRegionPath(startRegion, endRegion);
if(!regionPath.isComplete)
return path;
regionPath.drawPath();
path.path.push_back(start);
Region previousRegion;
for each(Region region in regionPath.path)
{
if(previousRegion)
{
for each(Chokepoint choke in region->getChokepoints())
{
if(choke->getRegions().first == previousRegion || choke->getRegions().second == previousRegion)
{
path.path.push_back(choke->getCenter());
break;
}
}
}
previousRegion = region;
}
path.path.push_back(target);
path.isComplete = true;
return path;
}
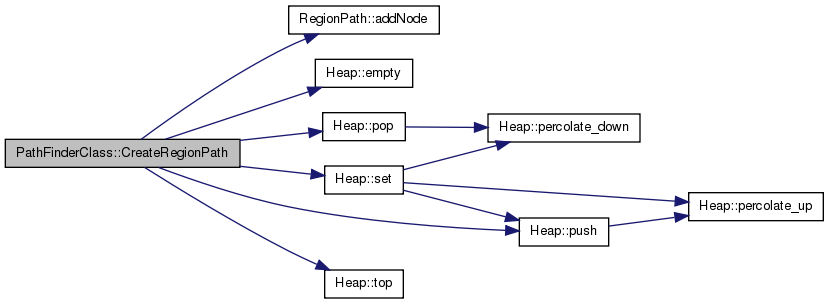
| RegionPath PathFinderClass::CreateRegionPath | ( | Region | start, |
| Region | target | ||
| ) |
Definition at line 143 of file PathFinder.cpp.
References RegionPath::addNode(), Heap< Key, Val >::empty(), RegionPath::isComplete, Heap< Key, Val >::pop(), Heap< Key, Val >::push(), Heap< Key, Val >::set(), and Heap< Key, Val >::top().
Referenced by CreateCheapWalkPath().
{
RegionPath path;
Heap<Region, int> openRegions(true);
std::map<Region, int> gmap;
std::map<Region, Region> parent;
std::set<Region> closedRegions;
openRegions.push(std::make_pair(start, 0));
gmap[start] = 0;
parent[start] = start;
while(!openRegions.empty())
{
Region region = openRegions.top().first;
if(region == target)
{
while(region != parent[region])
{
path.addNode(region);
region = parent[region];
}
path.addNode(start);
path.isComplete = true;
return path;
}
int gvalue = gmap[region];
int fvalue = openRegions.top().second;
openRegions.pop();
closedRegions.insert(region);
for each(Chokepoint choke in region->getChokepoints())
{
Region other = choke->getRegions().first;
if(other == region)
other = choke->getRegions().second;
int g = gvalue + region->getCenter().getApproxDistance(other->getCenter());
int h = other->getCenter().getApproxDistance(target->getCenter());
int f = g + h;
if(gmap.count(other) == 0 || g < gmap.find(other)->second)
{
gmap[other] = g;
openRegions.set(other, f);
parent[other] = region;
}
}
}
return path;
}

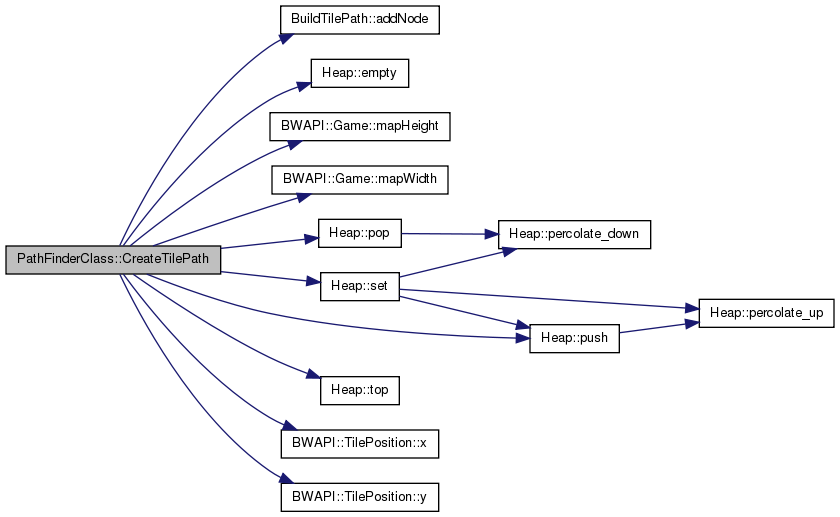
| BuildTilePath PathFinderClass::CreateTilePath | ( | TilePosition | start, |
| TilePosition | target, | ||
| std::tr1::function< bool(TilePosition)> | tileTest = DefaultTileTest(), |
||
| std::tr1::function< int(TilePosition, TilePosition, int)> | gFunction = DefaultGValue(), |
||
| std::tr1::function< int(TilePosition, TilePosition)> | hFunction = DefaultHValue(), |
||
| int | maxGValue = 0, |
||
| bool | diaganol = false |
||
| ) |
Definition at line 8 of file PathFinder.cpp.
References BuildTilePath::addNode(), BWAPI::Broodwar, Heap< Key, Val >::empty(), BuildTilePath::isComplete, BWAPI::Game::mapHeight(), BWAPI::Game::mapWidth(), Heap< Key, Val >::pop(), Heap< Key, Val >::push(), Heap< Key, Val >::set(), Heap< Key, Val >::top(), BWAPI::TilePosition::x(), and BWAPI::TilePosition::y().
Referenced by CreateAdvancedFleePath().
{
BuildTilePath path;
Heap<TilePosition, int> openTiles(true);
std::map<TilePosition, int> gmap;
std::map<TilePosition, TilePosition> parent;
std::set<TilePosition> closedTiles;
openTiles.push(std::make_pair(start, 0));
gmap[start] = 0;
parent[start] = start;
while(!openTiles.empty())
{
TilePosition p = openTiles.top().first;
int gvalue = gmap[p];
if(p == target || (maxGValue != 0 && gvalue >= maxGValue))
break;
int fvalue = openTiles.top().second;
openTiles.pop();
closedTiles.insert(p);
int minx = std::max(p.x() - 1, 0);
int maxx = std::min(p.x() + 1, BWAPI::Broodwar->mapWidth());
int miny = std::max(p.y() - 1, 0);
int maxy = std::min(p.y() + 1, BWAPI::Broodwar->mapHeight());
for(int x = minx; x <= maxx; x++)
{
for(int y = miny; y <= maxy; y++)
{
if (x != p.x() && y != p.y() && !diaganol)
continue;
TilePosition t(x, y);
if (closedTiles.find(t) != closedTiles.end())
continue;
if(!tileTest(t))
continue;
int g = gFunction(t, p, gvalue);
int f = g + hFunction(t, target);
if (gmap.find(t) == gmap.end() || g < gmap.find(t)->second)
{
gmap[t] = g;
openTiles.set(t, f);
parent[t] = p;
}
}
}
}
if(!openTiles.empty())
{
TilePosition p = openTiles.top().first;
while(p != parent[p])
{
path.addNode(p);
p = parent[p];
}
path.addNode(start);
path.isComplete = true;
}
return path;
}

| WalkPositionPath PathFinderClass::CreateWalkPath | ( | WalkPosition | start, |
| WalkPosition | target, | ||
| std::tr1::function< bool(WalkPosition)> | tileTest = DefaultWalkTest(), |
||
| std::tr1::function< int(WalkPosition, WalkPosition, int)> | gFunction = DefaultWalkGValue(), |
||
| std::tr1::function< int(WalkPosition, WalkPosition)> | hFunction = DefaultWalkHValue(), |
||
| int | maxGValue = 0, |
||
| bool | diaganol = false |
||
| ) |
Definition at line 252 of file PathFinder.cpp.
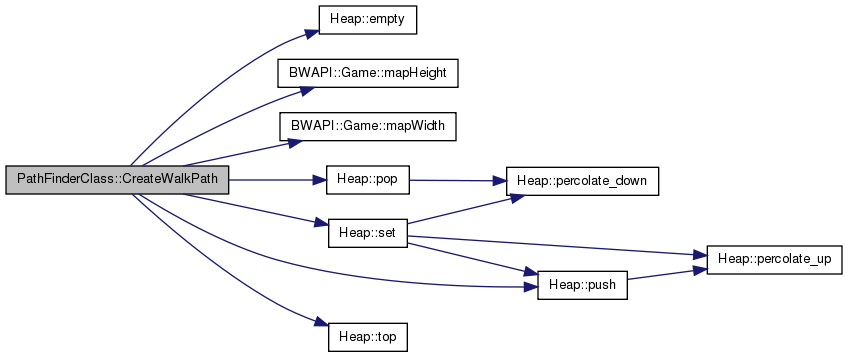
References BWAPI::Broodwar, Heap< Key, Val >::empty(), BWAPI::Game::mapHeight(), BWAPI::Game::mapWidth(), Heap< Key, Val >::pop(), Heap< Key, Val >::push(), Heap< Key, Val >::set(), Heap< Key, Val >::top(), WalkPosition::x, and WalkPosition::y.
{
WalkPositionPath path;
Heap<WalkPosition, int> openTiles(false);
std::map<WalkPosition, int> gmap;
std::map<WalkPosition, WalkPosition> parent;
std::set<WalkPosition> closedTiles;
int mapWidth = BWAPI::Broodwar->mapWidth() * 4;
int mapHeight = BWAPI::Broodwar->mapHeight() * 4;
openTiles.push(std::make_pair(start, 0));
gmap[start] = 0;
parent[start] = start;
while(!openTiles.empty())
{
WalkPosition p = openTiles.top().first;
int gvalue = gmap[p];
if(p == target || (maxGValue != 0 && gvalue >= maxGValue))
break;
int fvalue = openTiles.top().second;
openTiles.pop();
closedTiles.insert(p);
int minx = std::max(p.x - 1, 0);
int maxx = std::min(p.x + 1, mapWidth);
int miny = std::max(p.y - 1, 0);
int maxy = std::min(p.y + 1, mapHeight);
for(int x = minx; x <= maxx; x++)
{
for(int y = miny; y <= maxy; y++)
{
if (x != p.x && y != p.y && !diaganol)
continue;
WalkPosition t(x, y);
if(closedTiles.find(t) != closedTiles.end())
continue;
if(!tileTest(t))
continue;
int g = gFunction(t, p, gvalue);
int f = g + hFunction(t, target);
if (gmap.find(t) == gmap.end() || g < gmap.find(t)->second)
{
gmap[t] = g;
openTiles.set(t, f);
parent[t] = p;
}
}
}
}
for each(std::pair<WalkPosition, int> pos in gmap)
{
// DrawBuffer::Instance().drawBufferedLine(BWAPI::CoordinateType::Map, pos.first.x*8, pos.first.y*8, parent[pos.first].x*8, parent[pos.first].y*8, 999999);
// String_Builder string;
// string << pos.second;
// DrawBuffer::Instance().drawBufferedText(BWAPI::CoordinateType::Map, pos.first.x * 8, pos.first.y * 8, string, 999999);
}
if(!openTiles.empty())
{
WalkPosition p = openTiles.top().first;
while(p != parent[p])
{
path.addNode(p);
p = parent[p];
}
path.addNode(start);
path.isComplete = true;
}
return path;
}
 1.7.6.1
1.7.6.1

